
Hautes roues résistantes de robot de la roue 15km/H d'entraînement de moteur à courant alternatif de traction de charge en caoutchouc de la bande de roulement 2T
-
Surligner
roue d'entraînement de moteur à courant alternatif 2T
,roue d'entraînement de moteur à courant alternatif 15km/h
,roues résistantes du robot 15km/h
-
Bande de roulement de roueSoild en caoutchouc
-
Diamètre de roue400mm
-
Charge2t
-
vitesse15km/h
-
Puissance de traction2000W
-
Puissance de direction750W
-
Couple de sortie évaluée143Nm
-
Scène d'utilisationExtérieur
-
Lieu d'origineGuangzhou, Chine
-
Nom de marqueZHLUN
-
Numéro de modèleZL-490
-
Quantité de commande minNégociable
-
PrixNegotiable
-
Détails d'emballageEmballage : Boîte en bois
-
Délai de livraison25 jours
-
Conditions de paiementL/C, T/T
-
Capacité d'approvisionnement1000 morceaux par mois
Hautes roues résistantes de robot de la roue 15km/H d'entraînement de moteur à courant alternatif de traction de charge en caoutchouc de la bande de roulement 2T
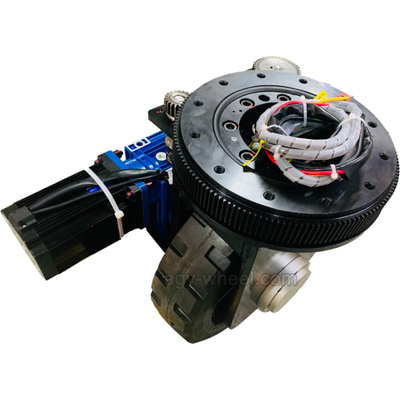
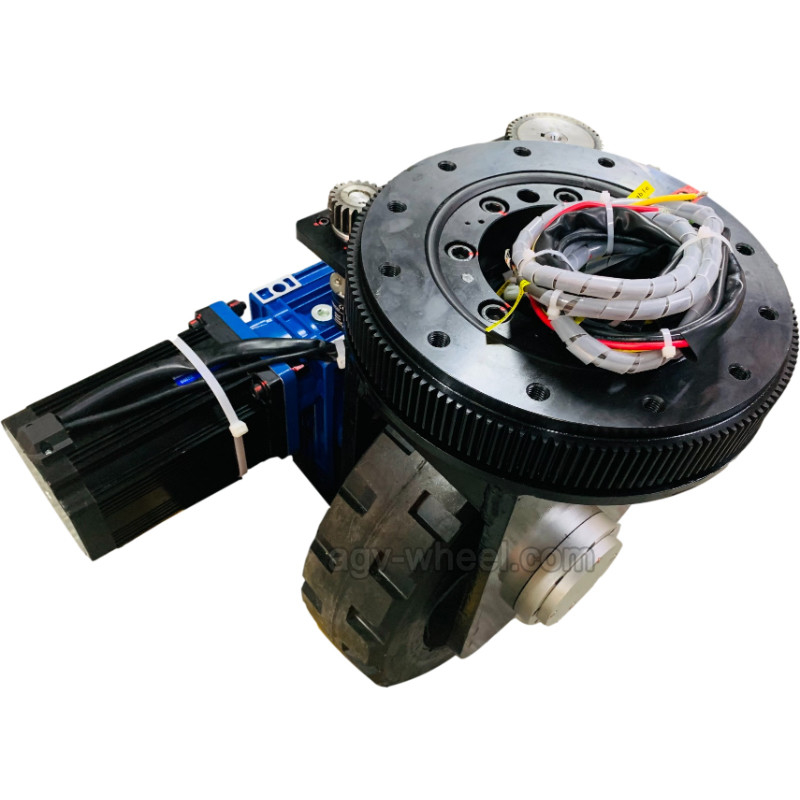
Le robot résistant de bande de roulement en caoutchouc roule la puissance élevée de traction de la charge 2T
Spécifications
|
Non
|
Article
|
Unité
|
Données
|
|
1
|
Taille d'installation
|
millimètre
|
490
|
|
2
|
Charge
|
Kilogramme
|
2000
|
|
3
|
Type de moteur
|
/
|
BLDC/Servo
|
|
4
|
Moteur de traction
|
Kilowatt
|
2
|
|
5
|
Rapport de vitesse
|
/
|
1h15
|
|
6
|
Moteur de direction
|
Kilowatt
|
0,75
|
|
7
|
Vitesse
|
km/h
|
15
|
|
8
|
Diamètre de roue
|
millimètre
|
400
|
|
9
|
Largeur de roue
|
millimètre
|
100
|
|
10
|
Capteur
|
/
|
Facultatif
|
|
11
|
Max.Torque
|
Nanomètre
|
143
|
|
Quelques paramètres peuvent être ajustés
|
|||
Caractéristiques
La structure antivibrationne des roues et le dispositif de direction de haut-couple des roues avec les roulements coniques sont rigoureusement conçus pour répondre aux exigences fonctionnelles.
Basé sur la dynamique spécifique de disposition et de véhicule de roue, le modèle cinématique de rotation aussi bien que les modèles dynamiques droits et de rotation de l'AGV sont établis.
Pour vérifier bien les caractéristiques de mouvement des roues sous la charge lourde dans trois états de mouvement comprenant le mouvement droit, l'auto-rotation et la rotation autour d'un certain point, les simulations en ADAMS et des expériences d'usine tous ont été conduites.
Les résultats de simulation indiquent que la normale et les forces de frottement des roues sont très stables excepté quelques petites oscillations, qui sont provoquées par la répartition des charges de non-centre sur l'AGV.
Les résultats expérimentaux sur conduire la vitesse de l'AGV ont directement démontré que son exactitude de positionnement est assez pour l'usage dans de vraies chaînes de montage d'avions.
On propose un nouveau plan extérieur de disposition des roues pour un AGV résistant omnidirectionnel, qui augmente opérer et la capacité mobile d'AGV. Une fonction de collaboration homme-machine est également offerte par l'AGV pour transporter de grands objets intelligemment et économiquement dans l'espace et d'autres industries lourdes.
![]()
![]()
![]()
Nos produits sont vendus dans le monde entier. Vous pouvez être assuré de l'ensemble du processus de nos produits.