Commande de atténuation différentielle résistante de moteur servo de roue de robot d'AGV
Spécifications
|
Article
|
Données de moteur
|
|
Modèle
|
ZL-B543 |
|
Type de moteur
|
DC/AC |
|
Minute de la puissance S2-60
|
3000 W
|
|
Rate Voltage
|
48V
|
|
Rate Speed
|
3000 r/min
|
|
Rate Torque
|
15 nanomètre
|
|
Rate Current
|
80 A
|
|
Rapport de vitesse
|
50 i |
|
Diamètre de roue
|
270*270 millimètre
|
|
Vitesse d'entraînement
|
30 m/min |
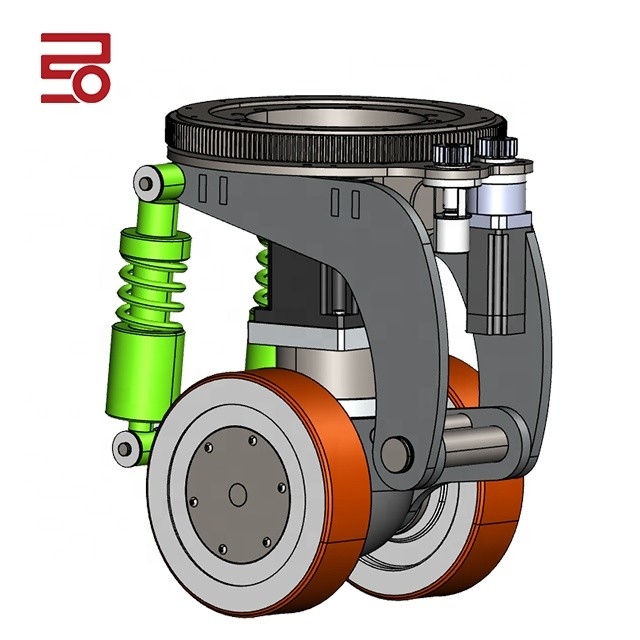
Description
La commande de roue de ZL se compose d'une roue, d'une boîte de vitesse planétaire intégrée et d'un rapport dans une unité courte. Combinant des commandes de roue avec nos moteurs et résultats de contrôleurs dans les systèmes compacts qui simplifient le développement et la production des systèmes autopropulsés, tels que des robots de service ou AGVs.
Conception qui fait gagner de la place
Charges radiales élevées de tenues
Différents diamètres de roue disponibles
Peuvent être combinés avec un large éventail de moteurs aussi bien que de freins et d'encodeurs
Les commandes de roue peuvent être commandées avec et sans un support. Pour la production de série Nanotec offre également les pneus adhésifs faits à partir des matériaux composites spéciaux.
Les commandes de roue de ZL sont disponibles en combination avec des moteurs dans différentes tailles
Fonction
1. Densité de puissance maximum
Charges radiales élevées et accélération et vitesse constamment élevées
2. Longue durée de vie
Système d'entraînement conçu pour l'efficacité avec une roue durable de PUR
3. De bas niveau de l'entretien
Les composants peuvent être individuellement remplacée grâce à la conception modulaire
4. Système intelligent d'entraînement
Fonction de prise et de jeu et un contrôle central de paramètre utilisant un système facultatif de capteur
5. Haut niveau de l'intégration
Tous les éléments fonctionnels logés dans un espace compact avec le poids minimal
6. Communication complète
Système de contrôle complet d'entraînement en tant que grâce d'un e-axe aux interfaces standard (par exemple RS485/Canopen, etc.)
![]()
![]()
![]()
Nos produits sont vendus dans le monde entier. Vous pouvez être assuré de l'ensemble du processus de nos produits.